





حتی چندشآورترین مخلوقات عالم نیز رازهای مهمی با خود دارند، اما چه کسی دوست دارد که گروهی از سوسکها به سمتش حرکت کنند؟
با وجود این، یکی از اصلیترین تفاوتهای میان فناوریهای طبیعی و فناوریهای ساخت دست انسان به استحکام آن مرتبط است. سیستمهای مستحکم در محیطهای جدید و پیچیده بسیار پایدارند. جذابتر از آن، سوسکها هستند که میتوانند در زمان حرکت در مسیرهای ناپایدار، وضعیت پایداری را در حرکت خود حفظ کنند. هنگامیکه ما به این سوسکها موتور جت وصل کردیم یا آنها را در شرایطی مشابه زلزله قرار دادیم، متوجه شدیم که این موجودات بهشکلی شگفتانگیز پاهای خود را تنظیم کرده و در نتیجه میتوانند ثباتشان را حفظ کنند. این موجودات قادرند روی مسیرهای پیچیده مانند علف حرکت کنند، بدون آنکه ذرهای از پایداری حرکتیشان کاهش یابد. ما رفتاری جدید در این موجودات کشف کردیم که به دلیل شکل اندامشان، برای گذر از محیط آزمون علفگونه ما، بهصورت خودکار به پهلو میغلطند(شکل 1).

شکل 1
سیستمهای مستحکم میتوانند چندین وظیفه را با ساختاری یکسان اجرا کنند. این رفتار جدیدی است که ما کشف کردیم. این موجودات طی زمان 150 میلیثانیه برگشته و ناپدید میشوند (شما هرگز آنها را نمیبینید) و این رخداد با استفاده از همان ساختاری است که برای دویدن استفاده میکنند(شکل2).

شکل 2
آنها میتوانند وارونه روی شاخهها، سیمها و هرچیز دیگری بهسرعت بدوند و اگر شما یکی از آن شاخهها را تکان دهید، بازهم میتوانند به همان شکل بدوند. همچنین، میتوانند حرکات ژیمیناستیک را بهگونهای انجام دهند که هیچ روباتی تاکنون نتوانسته است.
شناسنامه سخنرانی
سخنران: رابرت فول
مدت زمان سخنرانی: 5 دقیقه و 7 ثانیه
تاریخ سخنرانی: مارس 2014
کلیدواژه جستوجو: Robert full
کنفرانس: TED2014
سوسکها حرکتپذیری تقریباً نامحدودی را در قالب یک ساختار بدنی ثابت دارند و در نتیجه میتوانند در محیطهای گوناگونی حرکت کنند. این موجودات هنگامی که گرمای بدنشان بالا میرود، از بالهای خود برای پرواز استفاده میکنند، همین بالها در زمان ناپایدار شدن حرکتشان بسیار مؤثر و کارا به کمکشان میآید (شکل3).

شکل 3
همچنین سیستمهای مستحکم در برابر خطا، تحملپذیری بالایی دارند و در برابر خطاها ایمن، هستند. در اینجا نمایی از پای یک سوسک را میبینید.(شکل4) پاهای سوسک ستونهای فقرات، کفها و سرپنجههای چسبناک دارد.

شکل 4
با وجود این، اگر این پاها را از آنها جدا کنید، همچنان میتوانند در مسیرهای سخت، بدون کاهش سرعت، به دویدن ادامه دهند.(شکل5) این شگفتانگیز است، آنها میتوانند بدون پاهایشان بدوند.

شکل 5
این ساختار حیوانی معمولی با سه گروه سهتایی "پا" است. اما در طبیعت بیشتر حشرات پاهای خود را از دست میدهند. این یک نمونه حشره است که دو پای خود را از دست داده است (شکل 6).

شکل 6
حتی اگر یکی دیگر از پاهای خود را نیز از دست بدهد، شکلی جدید بهخود میگیرد و به حرکت ادامه میدهد (شکل 7).

شکل 7
توجه کنید که تمام ویدیوهای پخش شده در اینجا 20 بار آهسته شدهاند، بنابراین، وقتی شما این صحنه را ببینید، آنها همچنان بسیار سریع میدوند.سیستمهای مستحکم در برابر تخریب نیز مقاوماند.
رابرت فول، زیستشناس دانشگاه برکلی، شخصی است که به حرکت موجوداتی مانند سوسک، مارمولک و خرچنگهایی با تعداد زیاد پا، شکل نامعمول پا و دمهای هوشمند علاقهمند است. وی با بهکارگیری گروهی از دانشمندان رشتههای گوناگون، از جمله: زیستشناسان، مهندسان، ریاضیدانان و دانشمندان علوم کامپیوتر تلاش کرده است تا ارزش یادگیری از طبیعت را نشان دهد. تمرکز رابرت فول در مرکز CiBER، (مرکز آموزش و پژوهش میانرشتهای الهام گرفته از زیست) و آزمایشگاه Poly-PEDAL، بر مطالعه کارایی توزیع نیروی فیزیکی و داینامیک حرکت حیوانات (PEDAL) در مخلوقات با پای زیاد (Poly) است.
تحقیقات وی نشان میدهد مطالعه روی انواع حیوانات چگونه منجر به کشف قوانین بنیادی عمومی میشود که الهامبخش طراحی مدارهای نوین، عضلات مصنوعی، پوشش محافظتی و انواع روباتهای جستوجو و نجات است. رابرت فول از طرفداران آموزش مبتنیبر کشف است که به نوآوری منجر میشود. وی همچنین به شرکت پیکسار در ساخت فیلم «زندگی یک حشره» کمک کرده است.

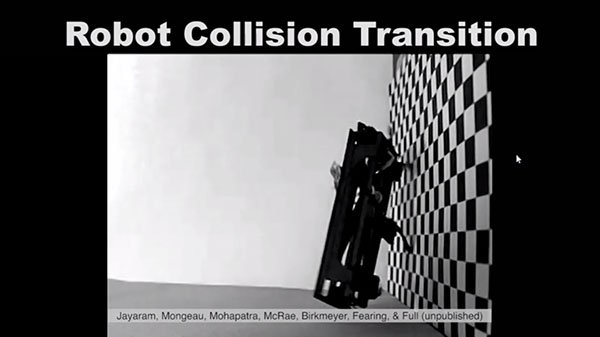
این یک سوسک در حال حرکت روی دیواری عمودی است. زمانیکه این تصویر را میبینید، حرکتی عمودی و بسیار روان است، اما وقتی این حرکت را آهسته کنید متوجه میشوید که اوضاع بسیار متفاوت است. این کاری است که آنها میکنند. سر این موجودات برخوردی عمدی با دیوار دارد، اما کند نمیشوند، بلکه در 75 میلیثانیه تغییر وضعیت میدهند(شکل 8).

شکل 8
تنها دلیلی که میتوانند این کار را انجام دهند، استخوانبندی بیرونی شگفتانگیز آنها است. اسکلت بیرونی بدن این موجودات از اتصالهای تطبیقپذیری تشکیل شده که به هم متصل شدهاند. این تصویر نمای کالبدشکافی شده از اسکلتخارجی سوسک را نشان میدهد (شکل 9).
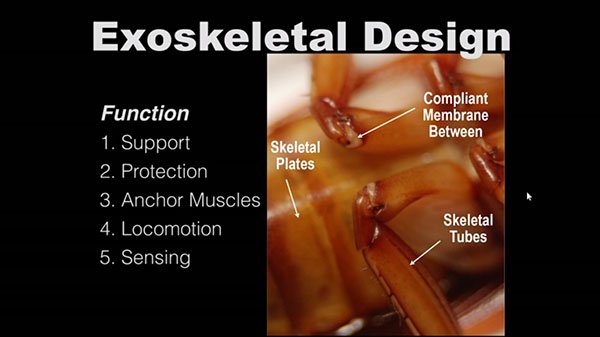
شکل 9
همکار مهندس من در برکلی به همراه دانش آموزانش، تکنیک بدیعی را طراحی کردهاند که در آن با استفاده از اوریگامی در کمتر از 15 دقیقه، ساختار بیرونی یک روبات با قطع زدن لیزری و تا زدن آن ساخته میشود. این روباتها که DASH نامیده میشوند بسیار تطبیقپذیر بوده و در نتیجه این ویژگیها مستحکم هستند (شکل10).
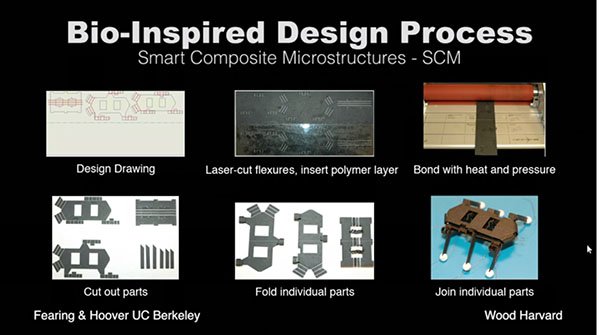
شکل 10
این روباتها برخی رفتارهای سوسکها را نیز دارند. در نتیجه، میتوانند از هوش و بدن تطبیق پذیرشان استفاده کنند و به شکلی ساده از دیوار بالا روند
(شکل 11).
شکل 11
این روباتها همچنین مدلی ابتدایی از رفتار ناپدید شدن سوسکها را نیز دارند. حالا ما میخواهیم بدانیم چرا این سوسکها میتوانند همهجا بروند. ما کشف کردیم که این موجودات قادرند، از یک فضای خالی 3 میلیمتری، یا فضای خالی ناشی از ارتفاع 2 پنی، یا فضایی به اندازه دو سکه روی هم قرار گرفته شده، عبور کنند و این کار را با چنان سرعتی انجام دهند که شما هرگز آنها را نمیبینید (شکل 12).

شکل 12
برای درک بهتر این موضوع، ما لایه خارجی بدنی این سوسکها را سیتیاسکن کرده و متوجه شدیم که این موجودات قادر هستند تا 40 درصد بدن خود را فشرده سازند. ما این موجودات را در محفظه فشار قرار داده و متوجه شدیم که قادرند تا 800 برابر وزن خود فشار را تحمل کرده و سپس بسیار عادی پروازکنند. بنابراین هرگز نخواهید دانست که تحقیق مبتنیبر کنجکاوی، شما را به کجا برده و شاید روزی بخواهید انبوهی از روباتهای الهام گرفته از سوسکها، به سمت شما بیایند.
ماهنامه شبکه را از کجا تهیه کنیم؟
ماهنامه شبکه را میتوانید از کتابخانههای عمومی سراسر کشور و نیز از دکههای روزنامهفروشی تهیه نمائید.
ثبت اشتراک نسخه کاغذی ماهنامه شبکه
ثبت اشتراک نسخه آنلاین
کتاب الکترونیک +Network راهنمای شبکهها
- برای دانلود تنها کتاب کامل ترجمه فارسی +Network اینجا کلیک کنید.
کتاب الکترونیک دوره مقدماتی آموزش پایتون
- اگر قصد یادگیری برنامهنویسی را دارید ولی هیچ پیشزمینهای ندارید اینجا کلیک کنید.




















نظر شما چیست؟